Integrating with existing code from Collision-Aware and Online Compression of Rigid Body Simulations via Integrated Error Minimization.
Project URL: Collision-Aware and Online Compression of Rigid Body Simulations via Integrated Error Minimization
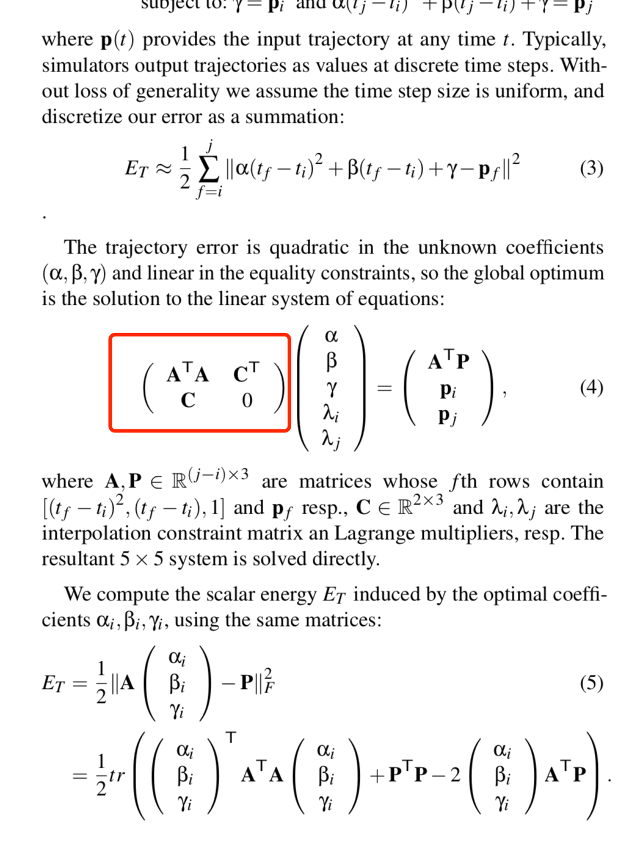
The original formula:
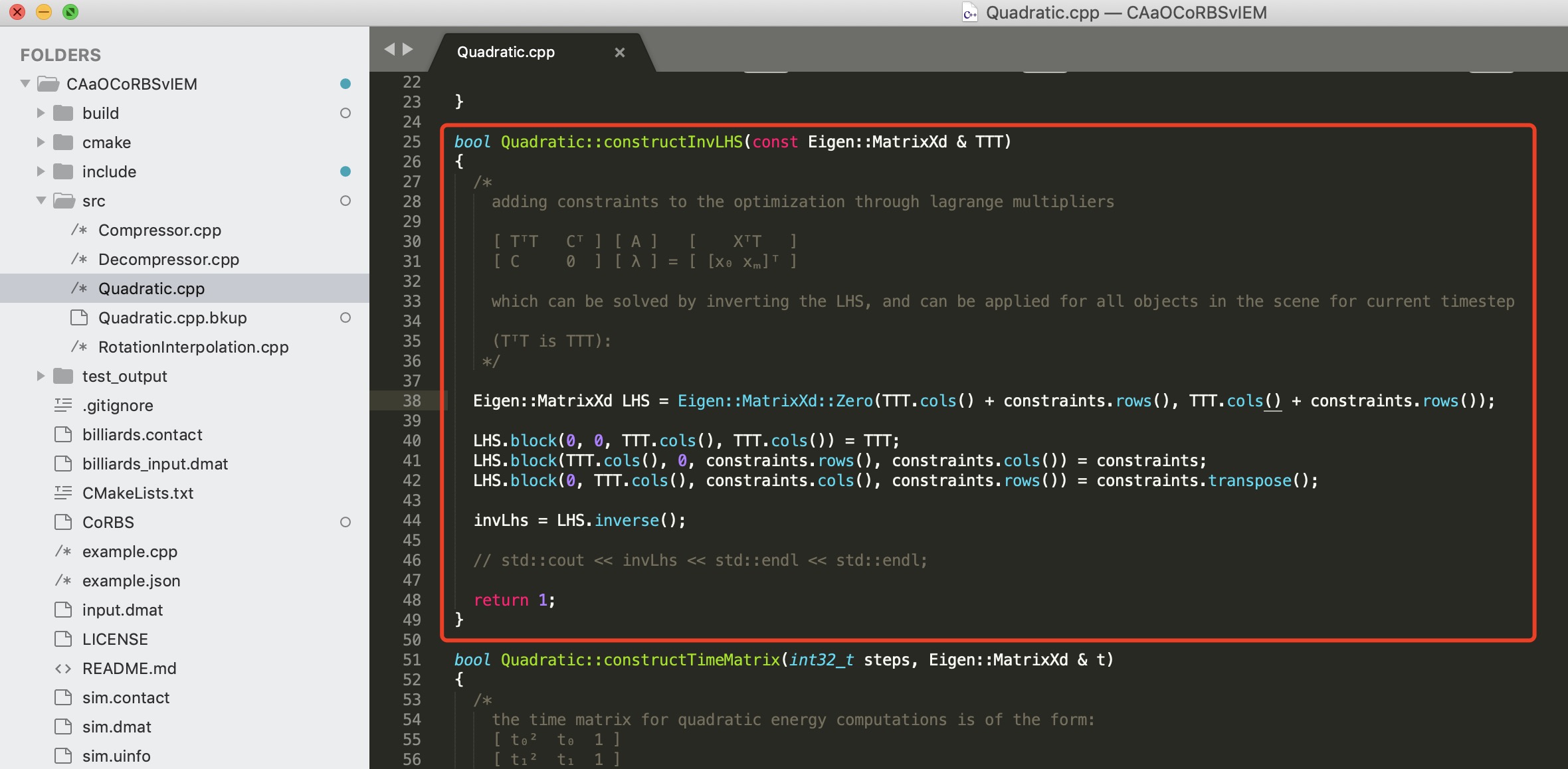
The original source code:
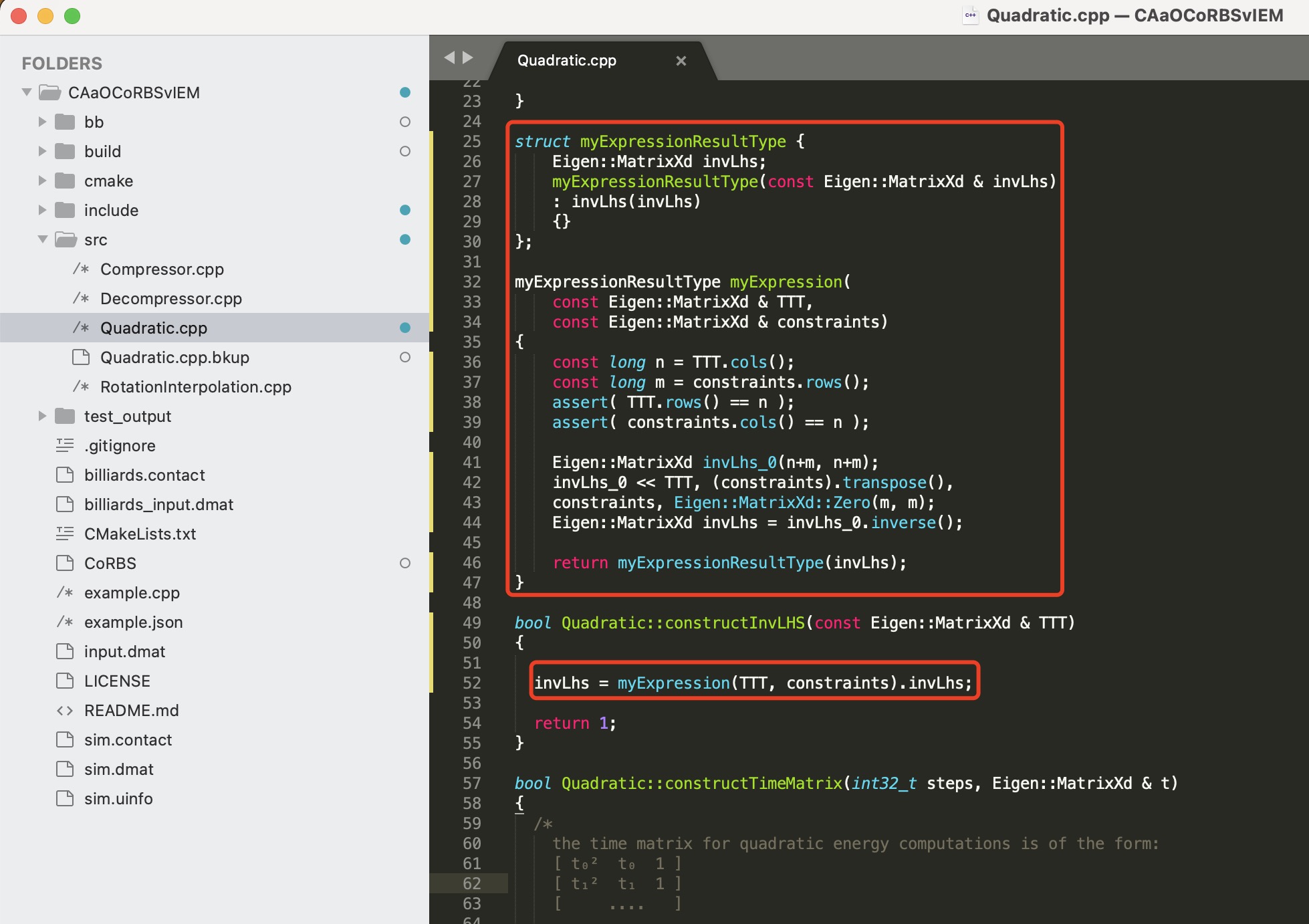
The modified source code:
I❤️LA source code:
invLhs = [TTT (constraints)^T
constraints 0 ]^(-1)
where
TTT ∈ ℝ^(n×n)
constraints ∈ ℝ^(m×n) I❤️LA LaTeX output: