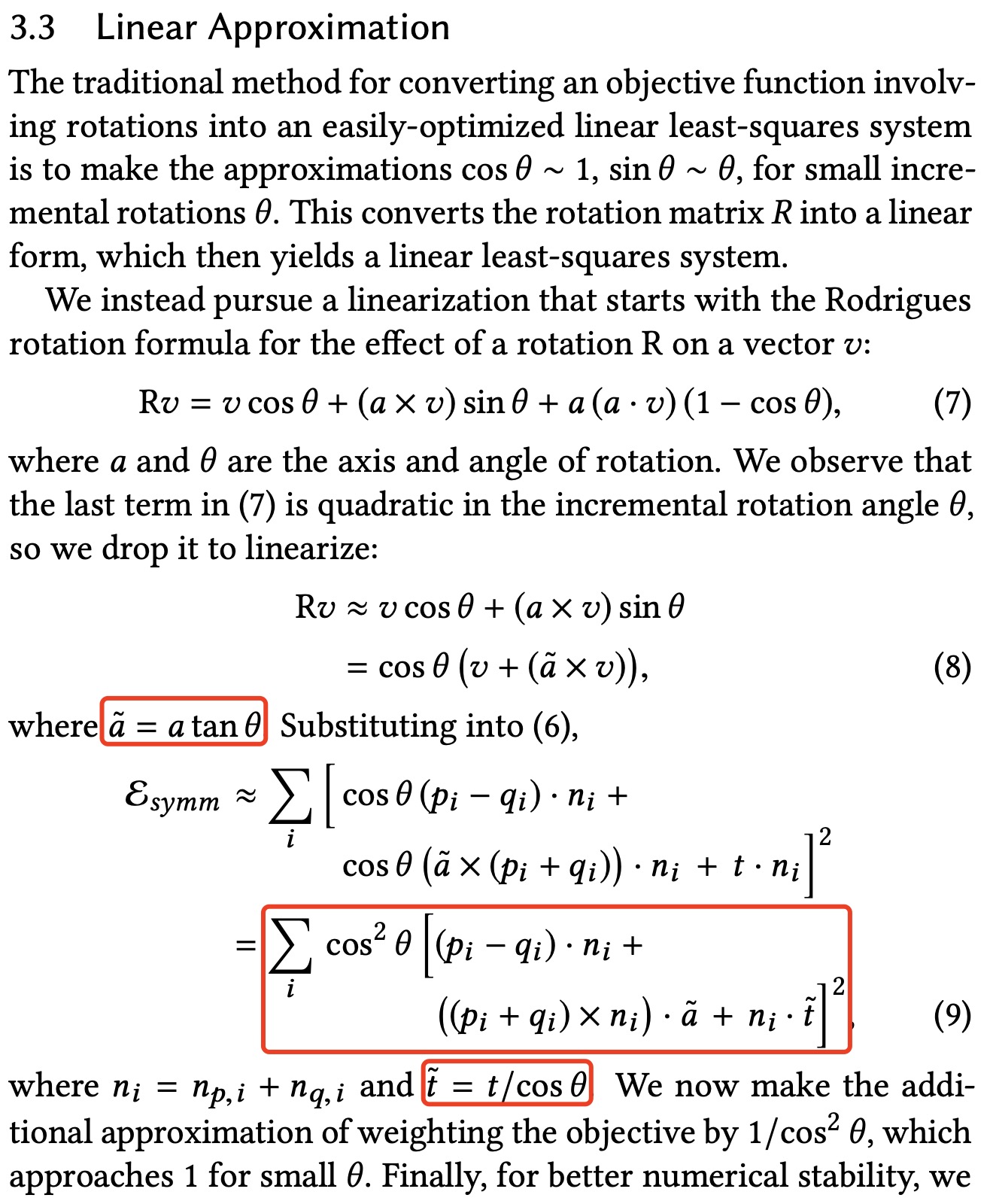
An example from A Symmetric Objective Function for ICP Eq. 9
The original equation:
I❤️LA implementation:
from trigonometry: tan, cos
t̃ = t/cos(θ)
ã = a tan(θ)
∑_i cos²(θ)((p_i - q_i)⋅n_i +((p_i+q_i)×n_i)⋅ã+n_i⋅t̃)²
where
a ∈ ℝ³ : axis of rotation
θ ∈ ℝ : angle of rotation
p_i ∈ ℝ³
q_i ∈ ℝ³
n_i ∈ ℝ³
t ∈ ℝ³I❤️LA compiled to C++/Eigen:
/*
from trigonometry: tan, cos
t̃ = t/cos(θ)
ã = a tan(θ)
∑_i cos²(θ)((p_i - q_i)⋅n_i +((p_i+q_i)×n_i)⋅ã+n_i⋅t̃)²
where
a ∈ ℝ³ : axis of rotation
θ ∈ ℝ : angle of rotation
p_i ∈ ℝ³
q_i ∈ ℝ³
n_i ∈ ℝ³
t ∈ ℝ³
*/
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/Sparse>
#include <iostream>
#include <set>
struct symmetric_objective_function_9ResultType {
Eigen::Matrix<double, 3, 1> t̃;
Eigen::Matrix<double, 3, 1> ã;
double ret;
symmetric_objective_function_9ResultType(const Eigen::Matrix<double, 3, 1> & t̃,
const Eigen::Matrix<double, 3, 1> & ã,
const double & ret)
: t̃(t̃),
ã(ã),
ret(ret)
{}
};
/**
* symmetric_objective_function_9
*
* @param a axis of rotation
* @param θ angle of rotation
* @return ret
*/
symmetric_objective_function_9ResultType symmetric_objective_function_9(
const Eigen::Matrix<double, 3, 1> & a,
const double & θ,
const std::vector<Eigen::Matrix<double, 3, 1>> & p,
const std::vector<Eigen::Matrix<double, 3, 1>> & q,
const std::vector<Eigen::Matrix<double, 3, 1>> & n,
const Eigen::Matrix<double, 3, 1> & t)
{
const long dim_0 = p.size();
assert( q.size() == dim_0 );
assert( n.size() == dim_0 );
Eigen::Matrix<double, 3, 1> t̃ = t / double(cos(θ));
Eigen::Matrix<double, 3, 1> ã = a * tan(θ);
double sum_0 = 0;
for(int i=1; i<=q.size(); i++){
sum_0 += pow(cos(θ), 2) * pow((((p.at(i-1) - q.at(i-1))).dot(n.at(i-1)) + ((((p.at(i-1) + q.at(i-1))).cross(n.at(i-1)))).dot(ã) + (n.at(i-1)).dot(t̃)), 2);
}
double ret = sum_0;
return symmetric_objective_function_9ResultType(t̃, ã, ret);
}
void generateRandomData(Eigen::Matrix<double, 3, 1> & a,
double & θ,
std::vector<Eigen::Matrix<double, 3, 1>> & p,
std::vector<Eigen::Matrix<double, 3, 1>> & q,
std::vector<Eigen::Matrix<double, 3, 1>> & n,
Eigen::Matrix<double, 3, 1> & t)
{
θ = rand() % 10;
const int dim_0 = rand()%10;
a = Eigen::VectorXd::Random(3);
p.resize(dim_0);
for(int i=0; i<dim_0; i++){
p[i] = Eigen::VectorXd::Random(3);
}
q.resize(dim_0);
for(int i=0; i<dim_0; i++){
q[i] = Eigen::VectorXd::Random(3);
}
n.resize(dim_0);
for(int i=0; i<dim_0; i++){
n[i] = Eigen::VectorXd::Random(3);
}
t = Eigen::VectorXd::Random(3);
}
int main(int argc, char *argv[])
{
srand((int)time(NULL));
Eigen::Matrix<double, 3, 1> a;
double θ;
std::vector<Eigen::Matrix<double, 3, 1>> p;
std::vector<Eigen::Matrix<double, 3, 1>> q;
std::vector<Eigen::Matrix<double, 3, 1>> n;
Eigen::Matrix<double, 3, 1> t;
generateRandomData(a, θ, p, q, n, t);
symmetric_objective_function_9ResultType func_value = symmetric_objective_function_9(a, θ, p, q, n, t);
std::cout<<"return value:\n"<<func_value.ret<<std::endl;
return 0;
}I❤️LA compiled to Python/NumPy/SciPy:
"""
from trigonometry: tan, cos
t̃ = t/cos(θ)
ã = a tan(θ)
∑_i cos²(θ)((p_i - q_i)⋅n_i +((p_i+q_i)×n_i)⋅ã+n_i⋅t̃)²
where
a ∈ ℝ³ : axis of rotation
θ ∈ ℝ : angle of rotation
p_i ∈ ℝ³
q_i ∈ ℝ³
n_i ∈ ℝ³
t ∈ ℝ³
"""
import numpy as np
import scipy
import scipy.linalg
from scipy import sparse
from scipy.integrate import quad
from scipy.optimize import minimize
class symmetric_objective_function_9ResultType:
def __init__( self, t̃, ã, ret):
self.t̃ = t̃
self.ã = ã
self.ret = ret
def symmetric_objective_function_9(a, θ, p, q, n, t):
"""
:param :a : axis of rotation
:param :θ : angle of rotation
"""
a = np.asarray(a, dtype=np.float64)
p = np.asarray(p, dtype=np.float64)
q = np.asarray(q, dtype=np.float64)
n = np.asarray(n, dtype=np.float64)
t = np.asarray(t, dtype=np.float64)
dim_0 = p.shape[0]
assert a.shape == (3,)
assert np.ndim(θ) == 0
assert p.shape == (dim_0, 3, )
assert q.shape == (dim_0, 3, )
assert n.shape == (dim_0, 3, )
assert t.shape == (3,)
t̃ = t / np.cos(θ)
ã = a * np.tan(θ)
sum_0 = 0
for i in range(1, len(q)+1):
sum_0 += np.power(np.cos(θ), 2) * np.power((np.dot(((p[i-1] - q[i-1])).ravel(), (n[i-1]).ravel()) + np.dot(((np.cross((p[i-1] + q[i-1]), n[i-1]))).ravel(), (ã).ravel()) + np.dot((n[i-1]).ravel(), (t̃).ravel())), 2)
ret = sum_0
return symmetric_objective_function_9ResultType(t̃, ã, ret)
def generateRandomData():
θ = np.random.randn()
dim_0 = np.random.randint(10)
a = np.random.randn(3)
p = np.random.randn(dim_0, 3, )
q = np.random.randn(dim_0, 3, )
n = np.random.randn(dim_0, 3, )
t = np.random.randn(3)
return a, θ, p, q, n, t
if __name__ == '__main__':
a, θ, p, q, n, t = generateRandomData()
print("a:", a)
print("θ:", θ)
print("p:", p)
print("q:", q)
print("n:", n)
print("t:", t)
func_value = symmetric_objective_function_9(a, θ, p, q, n, t)
print("return value: ", func_value.ret)I❤️LA compiled to MATLAB:
function output = symmetric_objective_function_9(a, theta, p, q, n, t)
% output = symmetric_objective_function_9(a, θ, p, q, n, t)
%
% from trigonometry: tan, cos
%
% t̃ = t/cos(θ)
% ã = a tan(θ)
% ∑_i cos²(θ)((p_i - q_i)⋅n_i +((p_i+q_i)×n_i)⋅ã+n_i⋅t̃)²
%
% where
% a ∈ ℝ³ : axis of rotation
% θ ∈ ℝ : angle of rotation
% p_i ∈ ℝ³
% q_i ∈ ℝ³
% n_i ∈ ℝ³
% t ∈ ℝ³
if nargin==0
warning('generating random input data');
[a, theta, p, q, n, t] = generateRandomData();
end
function [a, theta, p, q, n, t] = generateRandomData()
theta = randn();
dim_0 = randi(10);
a = randn(3,1);
p = randn(dim_0,3);
q = randn(dim_0,3);
n = randn(dim_0,3);
t = randn(3,1);
end
a = reshape(a,[],1);
t = reshape(t,[],1);
dim_0 = size(p, 1);
assert( numel(a) == 3 );
assert(numel(theta) == 1);
assert( isequal(size(p), [dim_0, 3]) );
assert( isequal(size(q), [dim_0, 3]) );
assert( isequal(size(n), [dim_0, 3]) );
assert( numel(t) == 3 );
t_tilde = t / cos(theta);
a_tilde = a * tan(theta);
sum_0 = 0;
for i = 1:size(q, 1)
sum_0 = sum_0 + cos(theta).^2 * (dot((p(i,:)' - q(i,:)'),n(i,:)') + dot((cross((p(i,:)' + q(i,:)'), n(i,:)')),a_tilde) + dot(n(i,:)',t_tilde)).^2;
end
ret = sum_0;
output.t_tilde = t_tilde;
output.a_tilde = a_tilde;
output.ret = ret;
end
I❤️LA compiled to LaTeX:
\documentclass[12pt]{article}
\usepackage{mathdots}
\usepackage[bb=boondox]{mathalfa}
\usepackage{mathtools}
\usepackage{amssymb}
\usepackage{libertine}
\DeclareMathOperator*{\argmax}{arg\,max}
\DeclareMathOperator*{\argmin}{arg\,min}
\usepackage[paperheight=8in,paperwidth=4in,margin=.3in,heightrounded]{geometry}
\let\originalleft\left
\let\originalright\right
\renewcommand{\left}{\mathopen{}\mathclose\bgroup\originalleft}
\renewcommand{\right}{\aftergroup\egroup\originalright}
\begin{document}
\begin{center}
\resizebox{\textwidth}{!}
{
\begin{minipage}[c]{\textwidth}
\begin{align*}
\text{from trigonometry import tan, cos}\\
\textit{t̃} & = \frac{\mathit{t}}{cos\left( \mathit{θ} \right)} \\
\mathit{ã} & = \mathit{a}tan\left( \mathit{θ} \right) \\
\omit \span \sum_\mathit{i} {cos\left( \mathit{θ} \right)}^{2}{\left( \left( \mathit{p}_{ \mathit{i} } - \mathit{q}_{ \mathit{i} } \right) \cdot \mathit{n}_{ \mathit{i} } + \left( \left( \mathit{p}_{ \mathit{i} } + \mathit{q}_{ \mathit{i} } \right) × \mathit{n}_{ \mathit{i} } \right) \cdot \mathit{ã} + \mathit{n}_{ \mathit{i} } \cdot \textit{t̃} \right)}^{2} \\
\intertext{where}
\mathit{a} & \in \mathbb{R}^{ 3} \text{ axis of rotation} \\
\mathit{θ} & \in \mathbb{R} \text{ angle of rotation} \\
\mathit{p}_{\mathit{i}} & \in \mathbb{R}^{ 3} \\
\mathit{q}_{\mathit{i}} & \in \mathbb{R}^{ 3} \\
\mathit{n}_{\mathit{i}} & \in \mathbb{R}^{ 3} \\
\mathit{t} & \in \mathbb{R}^{ 3} \\
\\
\end{align*}
\end{minipage}
}
\end{center}
\end{document}
I❤️LA LaTeX output: